Ein kleiner Baubericht vom MPX Dogfighter
von Christian.
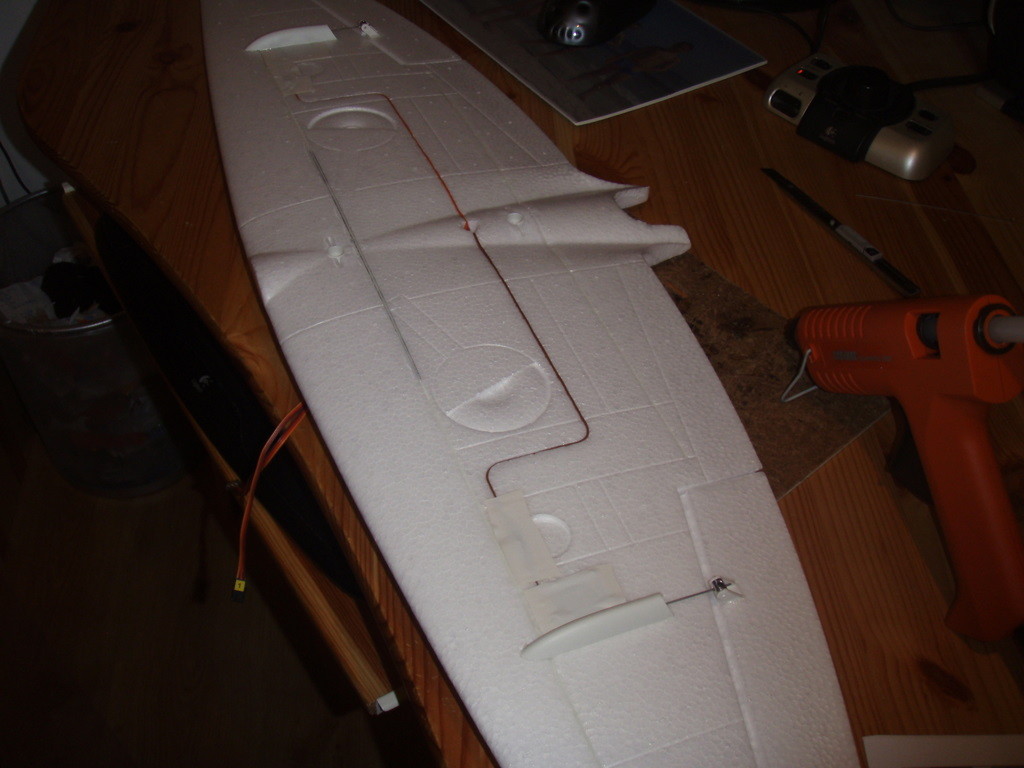
Da der Dogfighter im September 2011 endlich erhältlich war habe ich gleich zugeschlagen und mir einen gekauft. Zur Fertigstellung des Modells braucht man Superkleber, 4 Micro Servos einen Brushless Regler, Motor, Luftschraube einige Kabel, Stecker, Empfänger und Akku. Da auf meinen selbst zusammengestellten Antrieb keine Stecker waren mußte ich diese selbst Löten.
Beim Aufbau bin ich wie beim Twister der guten Bauanleitung gefolgt. Multiplex hat für die Servos vom Seitenruder und Höhenruder Einbau Rahmen vorgesehen die ich aber nicht verwenden konnte da meine vorhandenen HTX 900 Servos ein bißchen größer sind. Sie passen dafür saugend in den Elapor Schacht. Die Servokabel für die Querruder habe ich mit Meterware verlängert und Verlötet. Die Rudereinstellungen habe ich laut MPX übernommen und nach dem Erstflug auf Quer auf 14/14 +/- korrigiert da der Dogfighter sonst keine sauberen Rollen macht. In der Nasse habe ich leider 40 g Blei gebraucht da ich den Schwerpunkt sonst nicht hinbekommen hätte. Auf der Unterseite des Rumpfes und der Tragfläche habe ich den Dogfighter mit Glasfasergewebeband geschützt.
Obwohl mein verwendeter Antrieb der Turnigy 35-42A 1450KV 100KV mehr dreht als der MPX Ultra Antrieb habe ich bei der ersten Messung nur 130 km/h mit der 9x6 Luftschraube zusammengebracht. Mit der 9x7 CC aeronaut CAM- Carbon geht er gemessene 163 km/h, das ist für so ein kleines Modell sehr beachtlich.
Mittlerweile bin ich dazu übergegangen das Modell selbst zu Starten, es funktioniert auch besser .
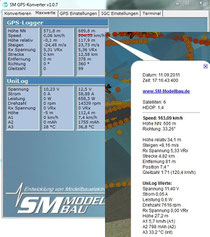
Ein Log von Aktuellen Antrieb im Dogfighter
Abfluggewicht 850 g
- Turnigy 35-42A 1450KV
- 9x7 CC aeronaut CAM- Carbon
- 3S 2200 mAh 30-40C Turnigy
- 58,88 Ampere
-
163 km/h hier passt der
HDOP Wert
- 23,73 m/s Steigen GPS Logger
Bin jetzt schon 173 km/h geflogen, hier gibt es den Log.